|

| For what it's worth, changing to straight lines did not work. Curved lines allows the actual path of the drone to be curved, "cutting the corner" so the drone does not actually pass over the waypoint. Straight lines forces the drone to actually go over the waypoint.
What does work for me is:
1. Setting two waypoints at each corner
2. The second waypoint of the second corner has the same heading set as the first waypoint of the third corner.
3. The first waypoint of the second corner has the same heading as the path between the first corner and the second corner
4. The second waypoint of the 3rd corner has the heading of the path between the 3rd corner and the 4th corner
Basically the beginning and ending waypoints of any long leg need to have the same headings:
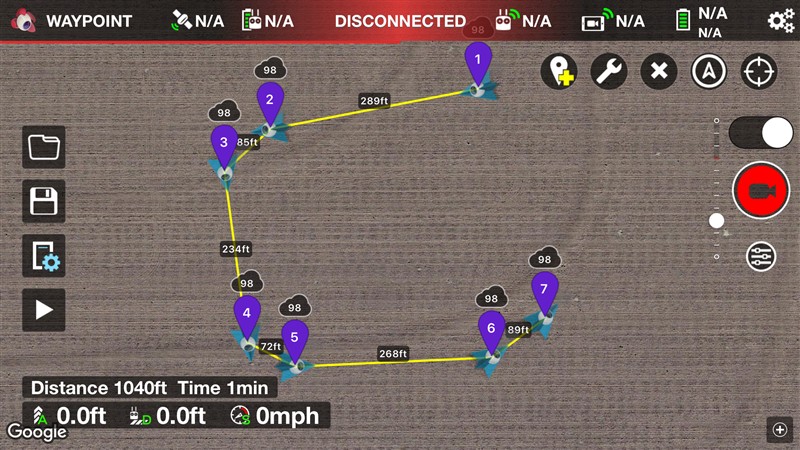 (IMG_7174.PNG) (IMG_7174.PNG)
Attachments
----------------
 IMG_7174.PNG (138KB - 333 downloads) IMG_7174.PNG (138KB - 333 downloads)
| |
|
 Litchi app causes Phantom 3 Pro to change heading way too soon
Litchi app causes Phantom 3 Pro to change heading way too soon

